Shoujie Li (李寿杰)
How to pronounce?
Currently, I am a Research Fellow at Nanyang Technological University.
In June 2025, I obtained a doctoral degree in Data Science and Information Technology from Tsinghua University and was honored as the Outstanding Doctoral Graduate of Tsinghua University and received the Outstanding Doctoral Dissertation Award from Tsinghua University.
I am very fortunate to be advised by Prof. Wenbo Ding of the SSR group from Tsinghua University. Previously, I pursued a master's degree in Artificial Intelligence at Tsinghua University in 2023,
advised by Prof. Xueqian Wang.
I received the Outstanding Mechanisms and Design Paper Finalists in ICRA 2022 , the Best Application Paper Finalists in IROS 2023, and 2023 Shenzhen Excellent Science and Technology Paper.
I won first place in the Robotic Grasping of Manipulation Competition-Picking in Clutter in ICRA 2024.
During my PhD studies at Tsinghua, I was awarded the National Scholarship for Doctoral Students, the Future Scholars Scholarship, and the Future Leaders Excellence Scholarship.
My research focuses on robotic perception, grippers designed, and embodied AI, with applications mainly on robotic manipulation.
Feel free to reach out for collaboration and discussion of research ideas.
Email: shoujie.li@ntu.edu.sg

Representative works

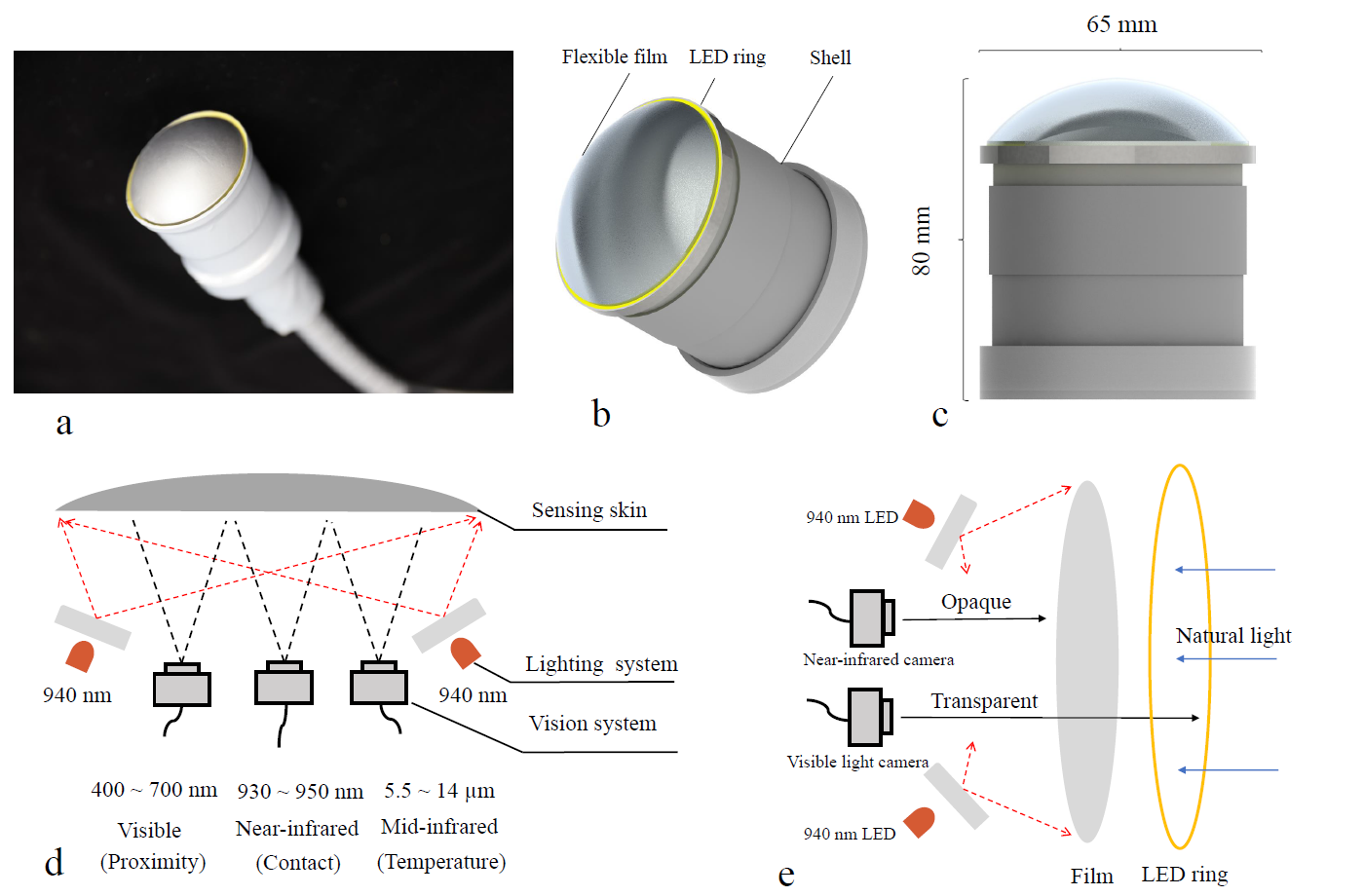
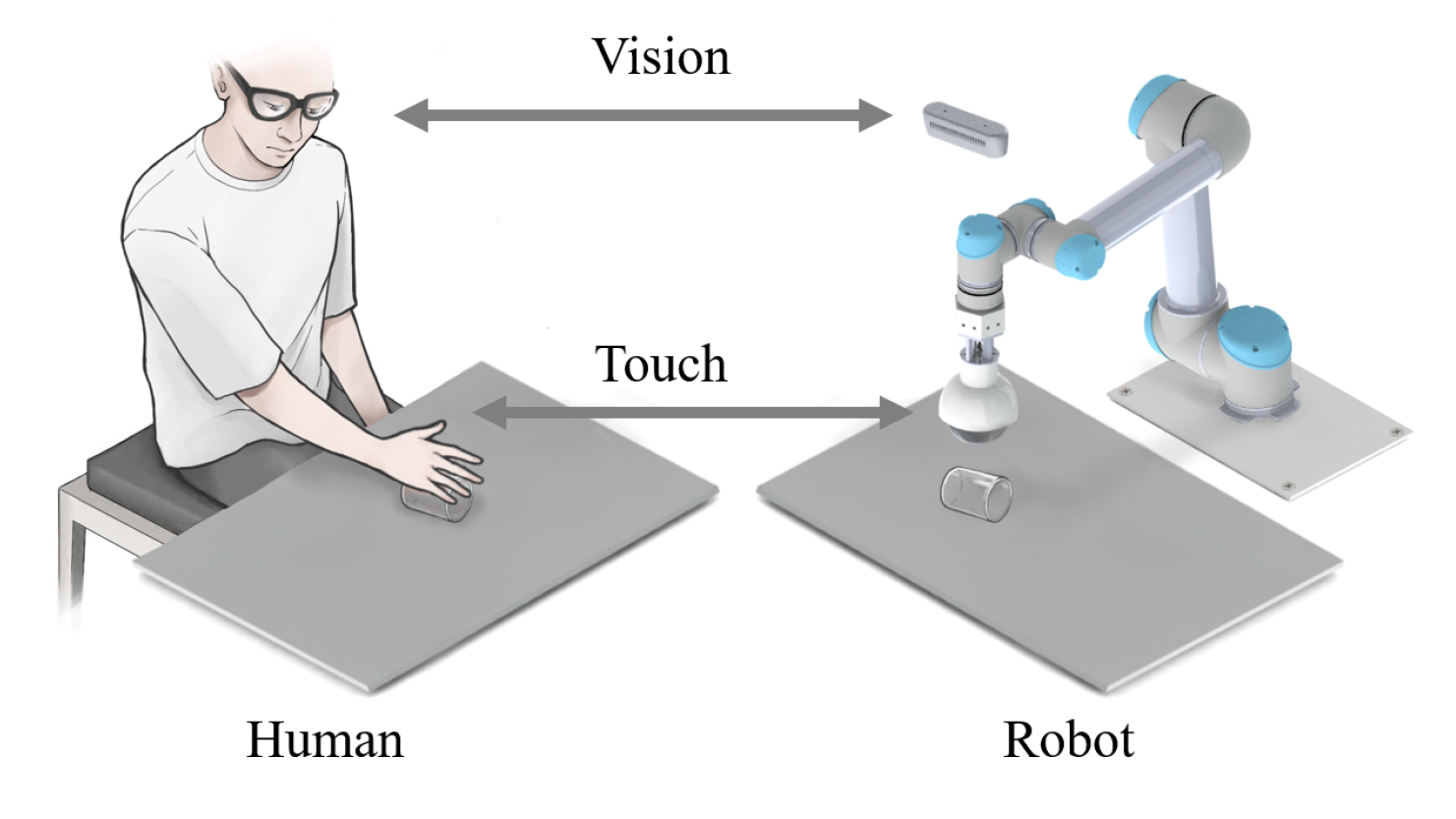
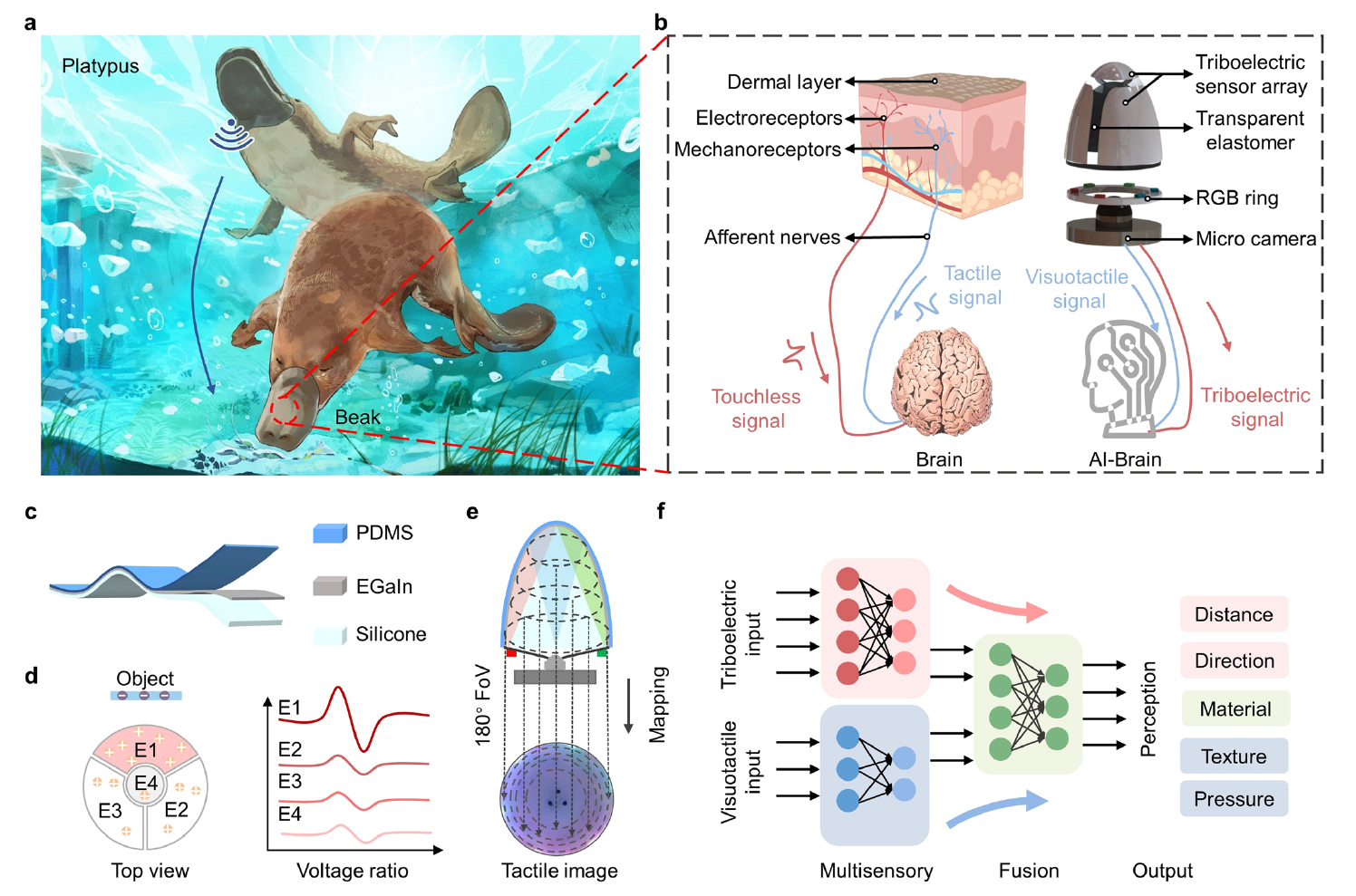
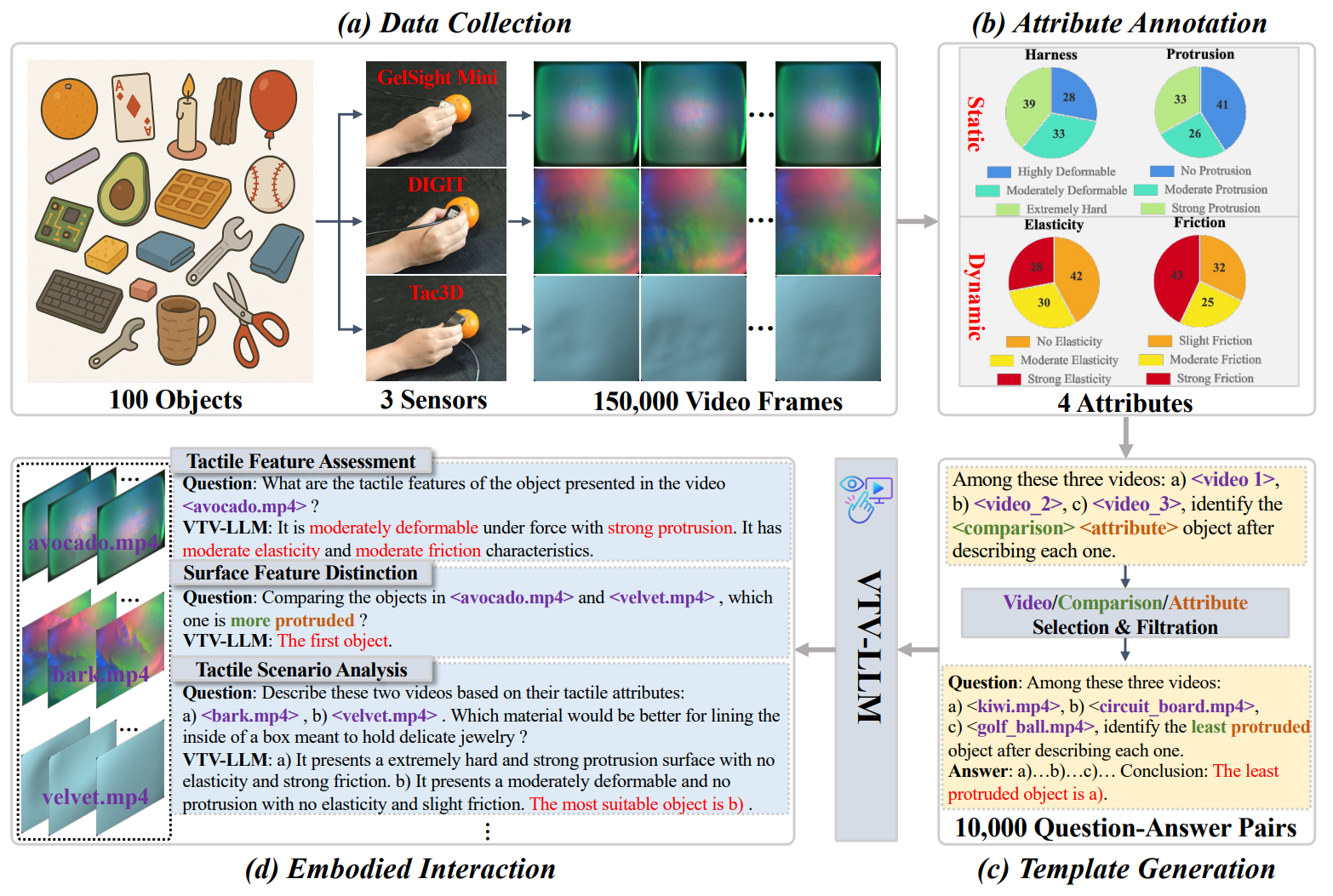
Biomimetic multimodal tactile sensing enables human-like robotic perception
Shoujie Li*, Tong Wu*, Jianle Xu*, Yan Huang, Zongwen Zhang, Hongfa Zhao, Qinghao Xu, Zihan Wang, Linqi Ye, Yang Yang, Chuqiao Lyu, Shilong Mu, Xueqian Wang, Zhaoqian Xie#, Changsheng Wu#, Xinge Yu#, Wenbo Ding#
Nature Sensors
Selected as the core element for the cover
The first paper from China published in Nature Sensors
PDF
|
Video
|
Source
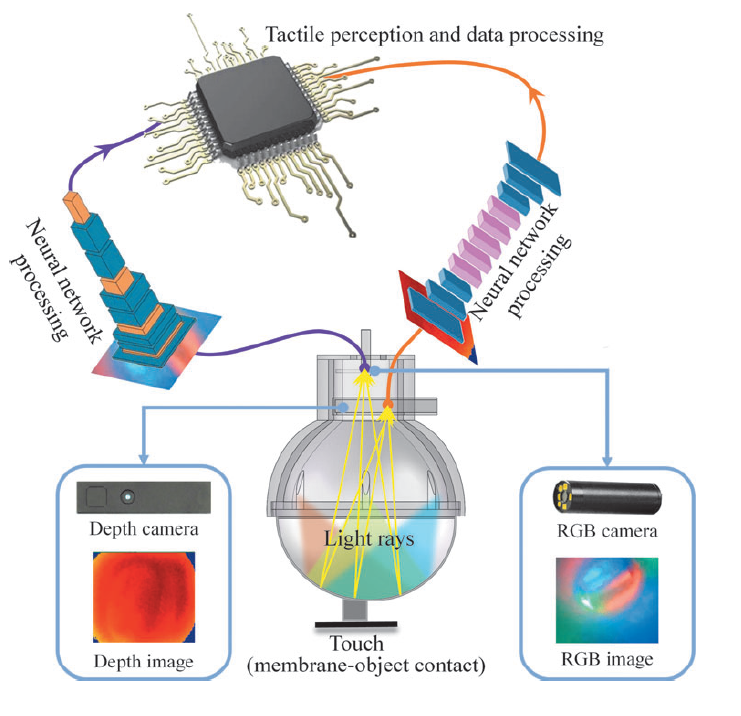
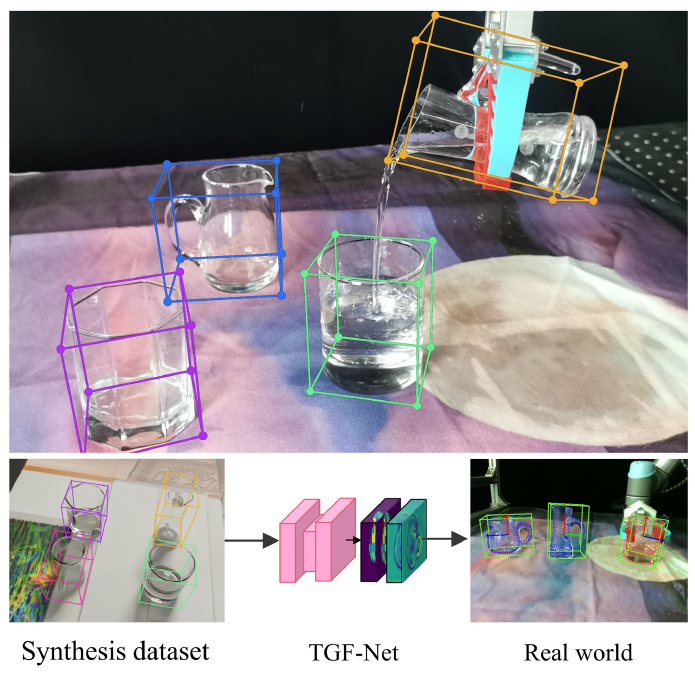
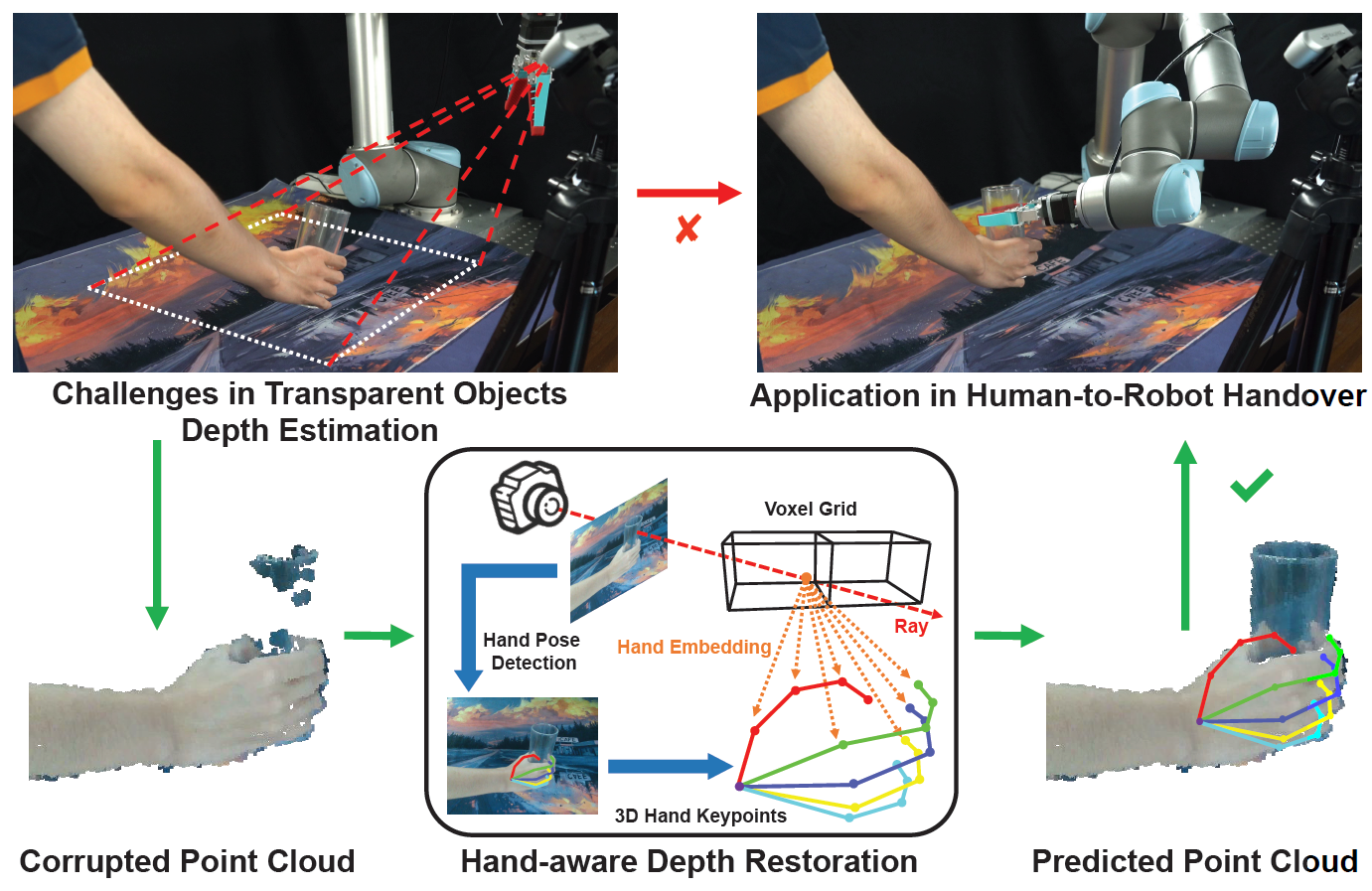
Visual-tactile Fusion for Transparent Object Grasping in Complex Backgrounds
Shoujie Li*, Haixin Yu*, Wenbo Ding#, Houde Liu#, Linqi Ye, Chongkun Xia, Xueqian Wang, Xiao-Ping Zhang
IEEE TRANSACTIONS ON ROBOTICS (T-RO)
2023 Shenzhen Excellent Science and Technology Paper
PDF
|
Video
|
Source
|
Webpage
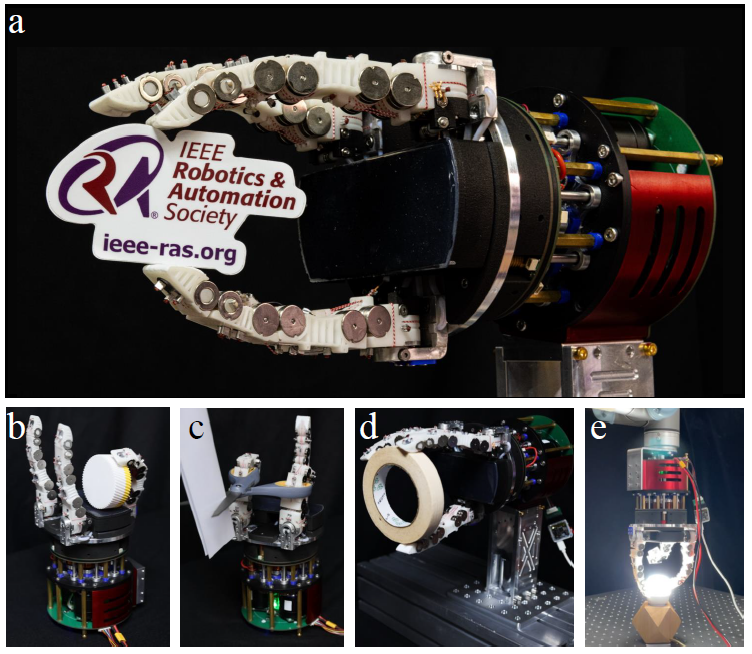
JamTac: A Tactile Jamming Gripper for Searching and Grasping in Low-Visibility Environments
Shoujie Li*, Linqi Ye*, Haixin Yu, Xianghui Yin, Chongkun Xia, Wenbo Ding, Xueqian Wang#, and Bin Liang#
Soft Robotics (Soro)
The second prize of China Postgraduate Robot Innovation and Design Competition
PDF
|
Video
|
Source


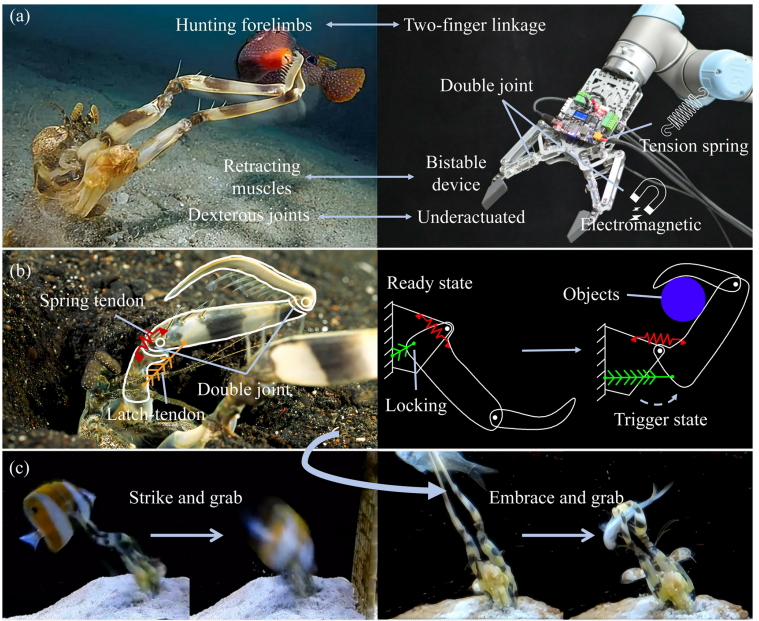
TaTa: A Universal Jamming Gripper with High-Quality Tactile Perception and Its Application to Underwater Manipulation
Shoujie Li*, Xianghui Yin*, Chongkun Xia, Linqi Ye, Xueqian Wang#, and Bin Liang
2022 IEEE International Conference on Robotics and Automation (ICRA)
The Outstanding Mechanisms and Design Paper Finalists
PDF
|
Video
|
Source
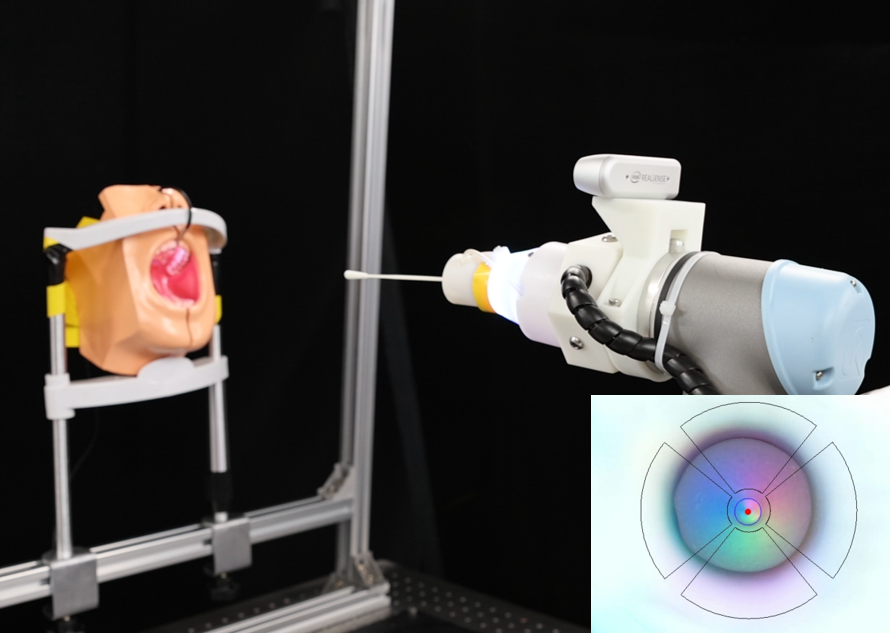
Visuotactile Sensor Enabled Pneumatic Device Towards Compliant Oropharyngeal Swab Sampling
Shoujie Li,Mingshan He, Wenbo Ding#, Linqi Ye, Xueqian Wang, Junbo Tan, Jinqiu Yuan, Xiao-Ping Zhang
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
The Best Application Paper Finalists
The second prize of China Postgraduate Robot Innovation and Design Competition
PDF
|
Video
|
Webpage
|
Source

Other works


Works in review
2025
Award, Future Leaders Scholarship in Tsinghua University (Top 2%), Tsinghua University.2025
Award, Outstanding Doctoral Dissertations of Tsinghua University (10%).2025
Award, Outstanding Doctoral Graduate of Tsinghua University (4%).2024
Award, The Autonomous Robotic Technology Seminar (ARTS) Scholarship, Shenzhen 2024.2024
Award, The Champion of Picking in Clutter in International Dexterity Challenge, Zhuhai 2024.2024
Award, The second prize of China Postgraduate Robot Innovation and Design Competition, Liaoning 2024.2024
Award, Winner of Robotic Grasping of Manipulation Competition - Picking in Clutter, ICRA 2024.2023
Award, The second prize of China Postgraduate Robot Innovation and Design Competition, Hangzhou 2023.2023
Award, Future Leaders Scholarship in Tsinghua University (Top 2%), Tsinghua University.2023
Award, PhD National Scholarship in Tsinghua University (Top 2%), Tsinghua University.2023
Award, Future Scholars Scholarship in Tsinghua University (Top 2%), Tsinghua University.2023
Award, Excellent Science & Technology Academic Paper, ShenZhen.2023
Award, Best Application Paper Finalists, IROS 2023.2022
Award, Outstanding Mechanisms and Design Paper Award Finalist, ICRA 2023.2022
Award, The second prize of China Postgraduate Robot Innovation and Design Competition, Changsha 2022.2022
Award, The second prize of China Postgraduate Artificial Intelligence Innovation Competition, Shenzhen 2022.2026
1 paper is accepted by IEEE Robotics and Automation Letters (RAL)!2025
Honored to present at MLNLP2025!2025
1 paper is accepted by Nature Sensors!!!!2025
The paper accepted by Journal of Field Robotics (J-FR) is selected as Front Cover!2025
I award Outstanding Doctoral Graduate of Tsinghua University(4%)!2025
I award Outstanding Doctoral Dissertation of Tsinghua University(10%)!2025
I Graduate form Tsinghua university!2025
6 papers have been accepted by IROS 2025!2025
1 paper has been accepted by IEEE Transactions on Mechatronics (T-MECH)!2025
Honored to present at Peking University Shenzhen Graduate School!2025
1 paper has been accepted by Journal of Field Robotics (J-FR)!2025
Honored to present at the Institute of Superlubricity Technology, thanks to Academician Zheng Quanshui!2025
1 paper is accepted by IEEE Robotics and Automation Letters (RAL)!2025
5 papers are accepted by ICRA 2025!2024
I get the Autonomous Robotic Technology Seminar (ARTS) Scholarship!2024
We get the champion of Picking in Clutter in International Dexterity Challenge and win 8w RMB!2024
We get the second prize of China Postgraduate Robot Innovation and Design Competition!2024
1 paper has been accepted by IEEE Transactions on Robotics (T-RO) !